| Accueil | Carrara : Index |
L'éditeur de formules de Carrara Studio - Page 32
Inverses d'harmoniques sphériques
Rappels : harmoniques sphériques : voir page 25
|
n0=?;n1=?;n2=?;n3=?;n4=?;n5=?;n6=?;n7=?; |
où n0 , n2 , n4 et n6 sont des réels et n1 , n3 , n5 et n7 des entiers positifs ou nuls.
Inversion
La surface de paramétrisation (xm , ym , zm) a pour inverse la surface de paramétrisation (x , y , z) dans l'inversion de pôle C (x0 , y0 , z0) et de puissance k
|
r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); |
Texture :
|
mt=5; |
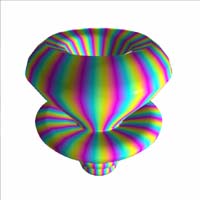
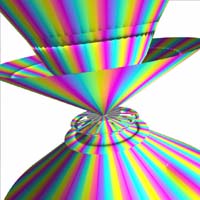
14660500 et inversion de pôle le point de coordonnées (0 , 0 , 0.5) et de puissance 5
| Formule objet | Rendu |
| n0=1;n1=4;n2=6;n3=6;n4=0;n5=5;n6=0;n7=0; x0=0;y0=0;z0=0.5;k=5; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
 |
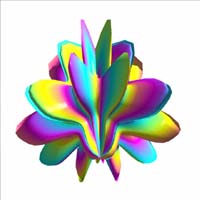
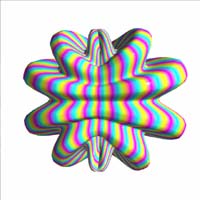
24023053 et inversion de pôle le point de coordonnées (0 , 0 , 0.5) et de puissance 5
| Formule objet | Rendu |
| n0=2;n1=4;n2=0;n3=2;n4=3;n5=0;n6=5;n7=3; x0=0;y0=0;z0=0.5;k=5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
 |
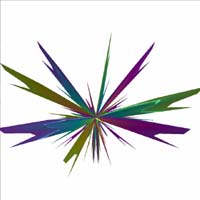
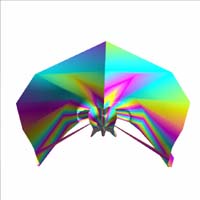
25343466 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=2;n1=5;n2=3;n3=4;n4=3;n5=4;n6=6;n7=6; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
 |
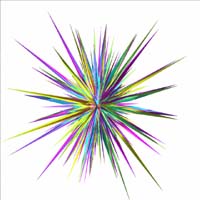
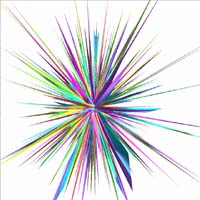
33313062 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=3;n1=3;n2=3;n3=1;n4=3;n5=0;n6=6;n7=2; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
34356130 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=3;n1=4;n2=3;n3=5;n4=6;n5=1;n6=3;n7=0; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
43246264 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=4;n1=3;n2=2;n3=4;n4=6;n5=2;n6=6;n7=4; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
43436363 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=4;n1=3;n2=4;n3=3;n4=6;n5=3;n6=6;n7=3; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
44256162 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=4;n1=4;n2=2;n3=5;n4=6;n5=1;n6=6;n7=2; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
53535252 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.5
| Formule objet | Rendu |
| n0=5;n1=3;n2=5;n3=3;n4=5;n5=2;n6=5;n7=2; x0=0;y0=0;z0=0;k=1.5; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
54041405 et inversion de pôle le point de coordonnées (0 , 1 , 0) et de puissance 10
| Formule objet | Rendu |
| n0=5;n1=4;n2=0;n3=4;n4=1;n5=4;n6=0;n7=5; x0=0;y0=1;z0=0;k=10; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
54545454 et inversion de pôle le point de coordonnées (0 , 0 , 1) et de puissance 1.5
| Formule objet | Rendu |
| n0=5;n1=4;n2=5;n3=4;n4=5;n5=4;n6=5;n7=4; x0=0;y0=0;z0=1;k=1.5; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
56410214 et inversion de pôle le point de coordonnées (0 , 0 , 1) et de puissance 1.2
| Formule objet | Rendu |
| n0=5;n1=6;n2=4;n3=1;n4=0;n5=2;n6=1;n7=4; x0=0;y0=0;z0=1;k=1.2; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
61631043 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.2
| Formule objet | Rendu |
| n0=6;n1=1;n2=6;n3=3;n4=1;n5=0;n6=4;n7=3; x0=0;y0=0;z0=0;k=1.2; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
63636464 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.2
| Formule objet | Rendu |
| n0=6;n1=3;n2=6;n3=3;n4=6;n5=4;n6=6;n7=4; x0=0;y0=0;z0=0;k=1.2; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |

|
63636363 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.2
| Formule objet | Rendu |
| n0=6;n1=3;n2=6;n3=3;n4=6;n5=3;n6=6;n7=3; x0=0;y0=0;z0=0;k=1.2; p=2*PI*u; q=2*PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|
64553464 et inversion de pôle le point de coordonnées (0 , 0 , 0) et de puissance 1.2
| Formule objet | Rendu |
| n0=6;n1=4;n2=5;n3=5;n4=3;n5=4;n6=6;n7=4; x0=0;y0=0;z0=0;k=1.2; p=2*PI*u; q=PI*v; rh1=pow(sin(n0*q),n1); rh2=pow(cos(n2*q),n3); rh3=pow(sin(n4*p),n5); rh4=pow(cos(n6*p),n7); rh=rh1+rh2+rh3+rh4; xm=rh*cos(p)*sin(q); ym=rh*sin(p)*sin(q); zm=rh*cos(q); r2=pow(xm-x0,2)+pow(ym-y0,2)+pow(zm-z0,2); x=x0+k*(xm-x0)/r2; y=y0+k*(ym-y0)/r2; z=z0+k*(zm-z0)/r2; |
|